ÇALIŞMA PRENSİBİ
Kuracağımız denge sistemi PID denetleme prensibiyle çalışmaktadır. hcsr 04 ultrasonik sensörün düzenek üzerinde hareket eden pinpon topunu algılayıp kendisi ile top arasında olan mesafeyi ve hata payını ölçerek aradaki mesafeyi arduino içerisine yazılmış olan PID algoritmasıyla kapatmaya çalışması ile topu dengede tutmayı sağlar. Top kodlar üzerinde belirlenmiş set değerine ulaştığında denge sistemi sağlanmış olur.
Devrenin Elektronik Şeması:
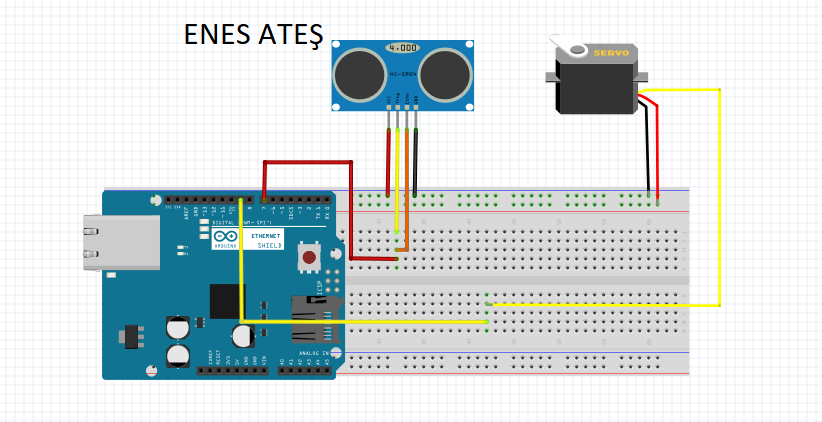
NOT: Normalde PİNG ultrasonik sensör kullanılması daha sağlıklı olsa da ülkemizde satışı olmadığı için HCSR 04 kullanmayı tercih ettim ve sinyal uçlarının ikisini birleştirerek PİNG sensör bağlantısının benzerini elde ettim.
Malzeme Listesi:
-Tower Pro SG90 RC Mini Servo Motor ;

-Arduino UNO ;

-HCSR 04 Ultrasonik Mesafe Sensörü ;

Arduino Kodları:
#include<Servo.h>
#include<PID_v1.h>
const int servoPin = 9;
float Kp = 2.5;
float Ki = 0;
float Kd = 1.1;
double Setpoint, Input, Output, ServoOutput;
PID myPID(&Input, &Output, &Setpoint, Kp, Ki, Kd, DIRECT);
Servo myServo;
void setup() {
Serial.begin(9600);
myServo.attach(servoPin);
Input = readPosition();
myPID.SetMode(AUTOMATIC);
myPID.SetOutputLimits(-80,80);
}
void loop()
{
Setpoint = 15;
Input = readPosition();
myPID.Compute();
ServoOutput=102+Output;
myServo.write(ServoOutput);
}
float readPosition() {
delay(40);
const int pingPin = 7;
long duration, cm;
unsigned long now = millis();
pinMode(pingPin, OUTPUT);
digitalWrite(pingPin, LOW);
delayMicroseconds(2);
digitalWrite(pingPin, HIGH);
delayMicroseconds(5);
digitalWrite(pingPin, LOW);
pinMode(pingPin, INPUT);
duration = pulseIn(pingPin, HIGH);
cm = duration/(29*2);
if(cm > 30)
{cm=30;}
Serial.println(cm);
return cm;
}
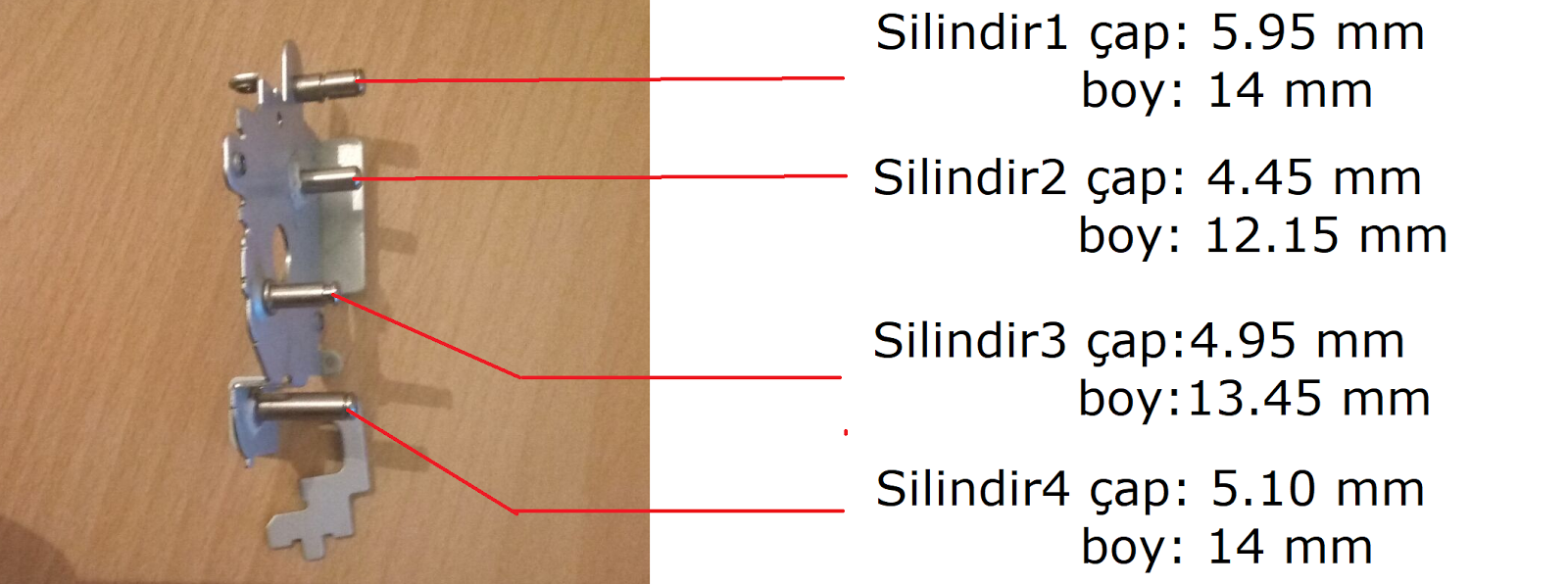
Mekanizma Ölçüleri: